chipKIT® Development Platform
Inspired by Arduino™
- Get Started
- Learning
- Products
- Blog
- Beginner
For first time users of chipKIT modules. - Intermediate
For users who have a moderate exposure with chipKIT modules. - Advanced
For users who are experts with chipKIT modules. - Developers
- About Us
- Support
HardwareSerial
| HardwareSerial | |
|---|---|
| Quick Look | |
| Hardware | (External hardware) |
| Core | HardwareSerial.h |
The HardwareSerial class implements methods for communicating with Hardware UARTs (Universal Asynchronous Receiver / Transmitter )
Detailed Introduction
The HardwareSerial class is derived from class Stream. It's purpose is to provide methods for sending and receiving data over the available UARTs.
Introductory Programs
attachInterrupt Example
Wiring Diagram
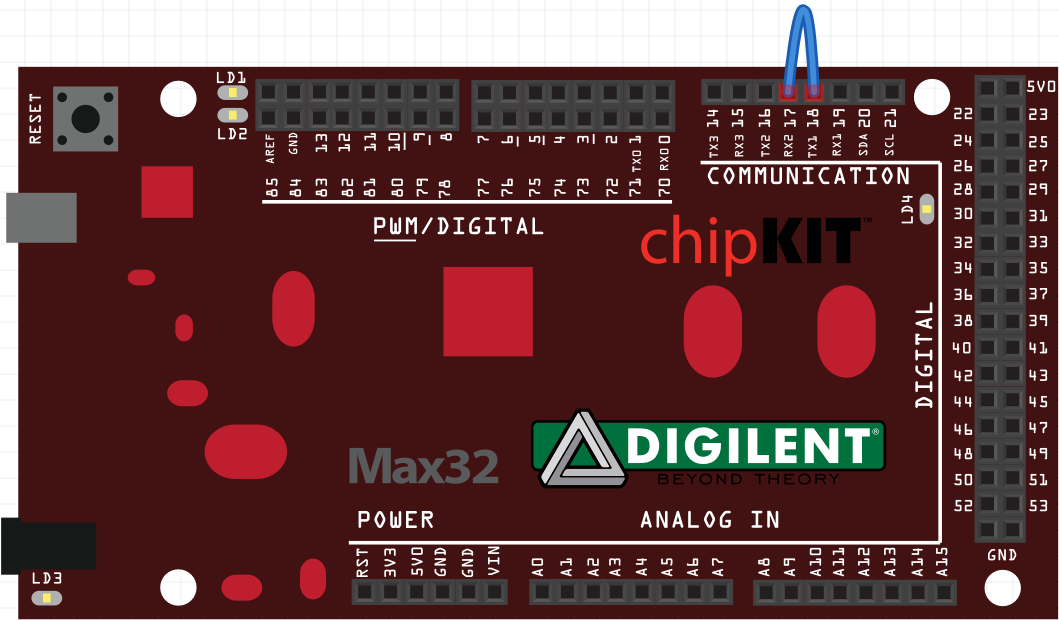 This example uses the chipKIT Max32 board by tying pins 17 (RX2) and 18 (TX1) with a short jumper wire.
This example uses the chipKIT Max32 board by tying pins 17 (RX2) and 18 (TX1) with a short jumper wire.
{{clear}}
/************************************************************************/
/* */
/* attachInterrupt Example */
/* */
/* Demonstrates how to use the attachInterrupt() function */
/* from HardwareSerial.h. Tthis example akes an input from Serial */
/* (Serial Monitor) then passes it to Serial1 (TX) which */
/* is connected via a physical wire to Serial2 (RX). Each time */
/* Serial2 receives a byte the myCallback function is fired. */
/* The callback appends the received character to a character */
/* array (inString) and increments a counter. When a newline */
/* character is received or when the character array is filled, */
/* the character array is printed to Serial Monitor. */
/************************************************************************/
/* Author: David Powell */
/* Created: 3/31/2017 */
/************************************************************************/
/************************************************************************/
/* Revision History: None */
/************************************************************************/
/************************************************************************/
/* Test String: */
/* abcdefghijklmnopqrstuvwxyzABCDEFGHIJKLMNOPQRSTUVWXYZ */
/************************************************************************/
#include <string.h>
// Maximum number of characters our character string can hold
#define MAX_STRING_LEN 26
char inByte;
int printFlag = false;
char inString[MAX_STRING_LEN] = "";
volatile int count = 0;
/* Used by myISR to Append Characters*/
void appendChar(char* s, char c)
{
int len = strlen(s); // Get the current length of our string
s[len] = c; // Place our new character at the end of the string
s[len+1] = '\0'; // Add string terminator to end of string
}
void myCallback(int c)
{
appendChar(inString, c); // Add character c to the inString character array
count++; // Count is equal to the number of times the interrupt appended a character
}
void setup() {
// Initialize the serial ports:
Serial.begin(9600);
Serial1.begin(9600);
Serial2.begin(9600);
Serial2.attachInterrupt(myCallback); // When char received on RX line fire callback
}
void loop() {
while (Serial.available())
{
if(count < MAX_STRING_LEN)
{
inByte = Serial.read(); // Read a byte from the hardware buffer
if(inByte != '\r' && inByte != '\n')
{
Serial.print(inByte); // Echo the Serial Monitor Input to Monitor Output
Serial1.print(inByte); // Send the byte fom Serial1 to Serial2 via physical wire
delay(5);
}
}
if(count == MAX_STRING_LEN || (count !=0 && inByte == '\r'))
{
Serial.println(""); // Blank line for formatting
Serial.print("Received String: "); // Label the character string array output
Serial.println(inString); // Print our character string array
Serial.print("Count: "); // Label the count output
Serial.println(count); // Print the number of times our callback was fired
Serial.println(""); // Blank line for formatting
inString[0] = '\0'; // Move string terminator to the beginning of the character array
count = 0; // Reset the counter
}
}
}
Full library usage
HardwareSerial
- Parent class: Stream
Constructors
HardwareSerial(p32_uart * uartP, int irq, int vec, int ipl, int spl, isrFunc isrHandler, int pinT, int pinR, ppsFunctionType ppsT, ppsFunctionType ppsR);
Create a new HardwareSerial object for PIC32MX1XX, PIC32MX2XX, PIC32MZXX, PIC32MX47X based boards
HardwareSerial(p32_uart * uartP, int irq, int vec, int ipl, int spl, isrFunc isrHandler);
Create a new HardwareSerial object for boards based on microcontrollers not listed above.
Constructor Parameters
| Parameter | Description |
|---|---|
| uartP | Pointer to base register for UART |
| irq | Base IRQ number for UART |
| vec | Interrupt vector for the UART |
| ipl | Interrupt priority level |
| spl | Interrupt sub-priority level |
| isrHandler | Interrupt Service Routine Handler |
| pinT | Digital pin number of TX |
| pinR | Digital pin number of RX |
| ppsT | Peripheral Pin Select for UART TX |
| ppsR | Peripheral Pin Select for UART RX |
Public Functions
doSerialInt(void)
void doSerialInt(void);
This function is called by the interrupt service routine for the UART being used by this object. It's purpose is to process receive interrupts and place the received characters into the receive buffer.
attachInterrupt(void (*callback)(int))
void attachInterrupt(void (*callback)(int));
Attach the interrupt. The callback parameter takes a funtion pointer.
Usage:
void myCallback(int c) {
//Do Something Quick
}
void setup() {
Serial2.attachInterrupt(myCallback);
}
detachInterrupt()
void detachInterrupt();
Detach the interrupt
enableAddressDetection (void)
void enableAddressDetection (void);
Sets the bit in the UART status register that enables address detection
disableAddressDetection(void)
void disableAddressDetection(void);
Clears the bit in the UART status register that enables address detection
begin(unsigned long baudRate)
void begin(unsigned long baudRate);
Initialize the UART for use, setting the baud rate to the requested value, data size of 8-bits, and no parity.
begin(unsigned long baudRate, uint8_t address)
void begin(unsigned long baudRate, uint8_t address);
Initialize the UART for use, setting the baud rate to the requested value, data size of 9-bits, and no parity and address detection mode
end()
void end();
Disable the UART and UART interrupts.
Virtual Private Functions
available(void)
virtual in available(void);
Return the number of characters currently available in the receive buffer.
peek()
virtual int peek();
This returns the next character in the receive buffer without removing it from the buffer, or -1 if no characters are in the buffer.
read(void)
virtual int read(void);
Return the next character from the receive buffer and remove it from the buffer, or -1 if no characters are available in the buffer.
flush(void)
virtual void flush(void);
Empty the send buffer by waiting for the fifo to empty and the transmitter to become idle
purge(void)
virtual void purge(void);
Empty the receive buffer by discarding any characters in the buffer.
write(uint8_t)
virtual size_t write(uint8_t);
Wait until the transmitter is idle, and then transmit thespecified character.
Print Class Functions
The following write functions are pulled in from the Print class.
write(const char *str)
size_t write(const char *str);
write(const char *buffer, size_t size)
size_t write(const char *buffer, size_t size);
Conversion Operator
int()
operator int();
Returns 1
External Links
- github.com/chipKIT32/chipKIT-core/tree/master/pic32/cores/pic32 - The github repository for the PIC32 chipKIT Core